使用教程
-

【PLC结构化编程】【机械自动化运动控制】中文PLC编程软件教程PDF下载,共有5个文件和一个PLC源程序下载,属高级教程,需要对本编程软件基础。 总结在PLC编程对【启动】【自检】【报警】【暂停】【急停】【人机界面采集】的重点经验总结,机械运动PLC编程,PLC逻辑编程。 01 PLC结构化编程教程PDF_启动与自检 02 PLC结构化编程教程PDF_自动控制程序 03 PLC...
-

本链接PDF文档详细介绍伺服电机在表格编程是如何一步一步操作,从开机自检,到逻辑控制,以及其它在实际机械编程时需要用到的功能,基本上可以说是比较完整的一套说明,我是经过多次在外面机械厂出差编程,包括PLC编程,和屏幕编程都可以参考本文PDF,这个文档是应用设计,对现场机械设计所需进行讲解,并不是学习这个【EasyDCS可编程控制系统】这个软件基础功能。 &...
-

用PLC来设计定时开关控制 用PLC来设计定时开关控制,非常详细的使用教程说明,一步一步说明到位,设计一个定时时间控制器,只需要表格选择,不需要梯型图编程,这个需要一个触摸屏来操作,屏的设计暂无说明。 PDF文档下载地址如下:可编程PLC定时开关控制器PDF下载 复杂物联网PLC程序控制:可编程 边缘计算、PLC网络远程控制教程
-

DCS分布式PLC可编程OPC物联网远程监控系统设计 在工业、工控行业中,在分散在不同地区不同空间的设备,需要对远程设备进行集中控制和监控时,远程终端有开关量,模拟量,电流、电压、电量、流量、压力、数量、温湿度环境数据、等各种各样的数据进行监控时,这时就需要一套可以发起多TCP连接数的DCS中控主机,发起连接时是支持Modbus-TCP和Modbus-RTU的,因为市场上通用各...
-

控制器恢复出厂IP地址的操作方法: 控制器在出厂前一般使用IP地址是192.168.1.250进行连接,这个IP地址其实并不是默认IP地址,是我们生产中将所有型号控制器直接修改成这个IP地址,用户使用各种型号时比较容易记住。 那默认IP地址是怎么产生的呢?于J4045型号为例,产品标签上有一个地址A,对应的下方就是一个小帽子,这个短路帽子有插着,和没插两种情况,当控制器上...
-

型号JRD-AD8028,为8通道模拟量AD采集模块,是一款工业极,精度高,温漂小,在正常采集数据时,精度可达小数4位半,或作为小数4位高精度来使用,本控制器可采集0V-10V,0V-5V,4-20mA,-10-10V,8路采集独立,电压与电流通过内部跳线切换,差分模式。 简介和优点: 1:外观与市场上不同厂家常见的模拟量采集模块无特别之处。 优点: 2:采集到电压,或电流,可直接...
-

介绍一:在中控主机扩展红外学习模块时,一般扩展1路红外模块时只是简单的跟扩展继电器开关相同,没有太多的设置,而扩展8通道红外模块,就需要编程设计一下切换功能,对于8个通道进行切换到哪里进行发送一开始中控并不知道,所以统过编程来设计。 介绍二:此教程设在软件计了从第1路到第8路是对于红外通道切换。其中切换通道,并不是控制,只是切换,控制时是从第9路开...
-

本视频只是让大家认识一下编程软件的一些指令的生成。
-

【远程设备多管理控制终端】【L3.51】 ,【L3.56】,【2.1.2】 上图视频设置定时的操作方法 上图视频定时器的读取时间的方法: 上图视频操作定时器时间导出为文件方法,和导入文件写进控制器方法 物理继电器功能是提供DCS中控主机的型号【DCS-SERVER400】调度。
-

【远程设备多管理控制终端】是可以管理多台设备,在管理软件可以直接控制,查看在线状态,修改设置定时时间等操作。一个软件最多可以管理几百上千台控制器,这是根据电脑的配置,一般普通电脑也可以管理200台控制器。管理软件建议可以安装在WIN7系统,和WIN10系统中。 1:电脑管理软件安装后,打开即可,什么都不用动,不用理。这是一套应用软件,操作员使用时就应该...
下载中心
-
机械自动化中文可编程PLC【高级教程】【PLC结构化...
【PLC结构化编程】【机械自动化运动控制】中文PLC编程软件教程PDF下载,共有5个文件和一个PLC源程序下载,属高级教程,需要对本编程软件基础。 总结在...
-
 PC电脑4路、8路、16路、32路软件下载
PC电脑4路、8路、16路、32路软件下载说明:下载压缩文件到电脑时,如果显示后缀名为.man时,需要自行改名为.RAR再进行解压。 较早前的IP地址修改软件,当你需要安装下方的4路,8路...
-
 各种高清PDF接线图纸,方案图纸下载
各种高清PDF接线图纸,方案图纸下载可调节延时倒计时供电接线方式 延时控制系统电磁阀接线方法 10路开关_DS100电源,用电设备接线方法 温室控制系统结构系统图 三层智能家居别墅...
-
 RS485总线学习型红外转发器,Modbus-RTU红外线学习...
RS485总线学习型红外转发器,Modbus-RTU红外线学习...上图8通道独立【学习型外发射总线通迅模块】 上图1通道独立【学习型外发射总线通迅模块】 软件安装后,在开始程序中“网络设备管理终端” ...
-
 串口通信控制开关软件下载,Delphi 7源代码
串口通信控制开关软件下载,Delphi 7源代码Delphi 7源代码串口通迅软件,串口控制界面,百度盘下载地址:https://pan.baidu.com/s/1i6YOwlf 界面预览
-
 PC电脑软件下载、IOS苹果软件下载,APP安卓软件下...
PC电脑软件下载、IOS苹果软件下载,APP安卓软件下...PC端控制软件,单套控制操作软件在这里下载安装使用 以下几个软件支持系统格式为32位和64位:win2000、XP、WIN7、WIN8、WIN10,安装方...

RS485智能开关控制器,控制协议,
型号:DS1010,RS485通迅接口的控制器
串口调试工具下载地址:http://www.jinruida.net/wp-content/uploads/2017/01/ComMonitor45.zip
Modbus通过测试工具下载地址:
http://www.jinruida.net/wp-content/uploads/2016/11/Modbus-Poll-v3.60.rar
本文章完整版PDF下载地址:精锐达-RS485通迅控制协议
- 快速复制十六进制控制码,控制继电器开关。【05功能码】
第01路开: 01 05 01 00 FF 00 8D C6
第02路开: 01 05 01 01 FF 00 DC 06
第03路开: 01 05 01 02 FF 00 2C 06
第04路开: 01 05 01 03 FF 00 7D C6
第05路开: 01 05 01 04 FF 00 CC 07
第06路开: 01 05 01 05 FF 00 9D C7
第07路开: 01 05 01 06 FF 00 6D C7
第08路开: 01 05 01 07 FF 00 3C 07
第09路开: 01 05 01 08 FF 00 0C 04
第10路开:01 05 01 09 FF 00 5D C4
第01路关: 01 05 01 00 00 00 CC 36
第02路关: 01 05 01 01 00 00 9D F6
第03路关: 01 05 01 02 00 00 6D F6
第04路关: 01 05 01 03 00 00 3C 36
第05路关: 01 05 01 04 00 00 8D F7
第06路关: 01 05 01 05 00 00 DC 37
第07路关: 01 05 01 06 00 00 2C 37
第08路关: 01 05 01 07 00 00 7D F7
第09路关: 01 05 01 08 00 00 4D F4
第10路关:01 05 01 09 00 00 1C 34
- 时序控制,控制所有继电器开关,【05功能码】
时序全开:01 05 02 20 FF 00 8C 48
时序关开:01 05 02 21 FF 00 DD 88
- 设备重启【05功能码】
重启控制器,使修改的一些参数得到运行:01 05 1D 59 FF 00 5A 45
- 时序控制,调节间隔时间。【06功能码】
设成1秒的时序间隔时间调节:01 06 27 10 00 01 43 7B
设成3秒的时序间隔时间调节:01 06 27 10 00 03 C2 BA
设成5秒的时序间隔时间调节:01 06 27 10 00 05 42 B8
- 开关量操作的定义,校验码的操作【05功能码】
第01路开: 01 05 01 00 FF 00 8D C6
| 设备号 | 功能码 | 寄存器高位 | 寄存器底位 | 高位数值 | 底位数值 | 高位校验 | 底位校验 |
| 01 | 05 | 01 | 00 | FF | 00 | 8D | C6 |
于发送01 05 01 00 FF 00 8D C6表示控制第1路继电器打开,详解:
设备号:表示当购买多台设备,在同一条RS485总线上进行手拉手连接多台时,每一台的设备必须是唯一的设备号,才能区别和控制是哪一台哪一路的开关,设备出厂时时默认一般有01或02等不固定设备号,可参考标签上显示,可后续修改。
功能码:功能码05表控制单个继电器开关。
寄存器高位,寄存器底位:一般两个数组成一个值,0100(100)是一个十六进制数据,正常我们沟通时是于十进制沟通,转为十进制是256。我们控制第一路继电器的时候是从256开始为第1路,257为第二路等。
高位数值:当高位数值设置为FF时表示打开,设置为00时表示关闭。
底位数值:开与关时,默认均填00。
高位校验、底位校验:
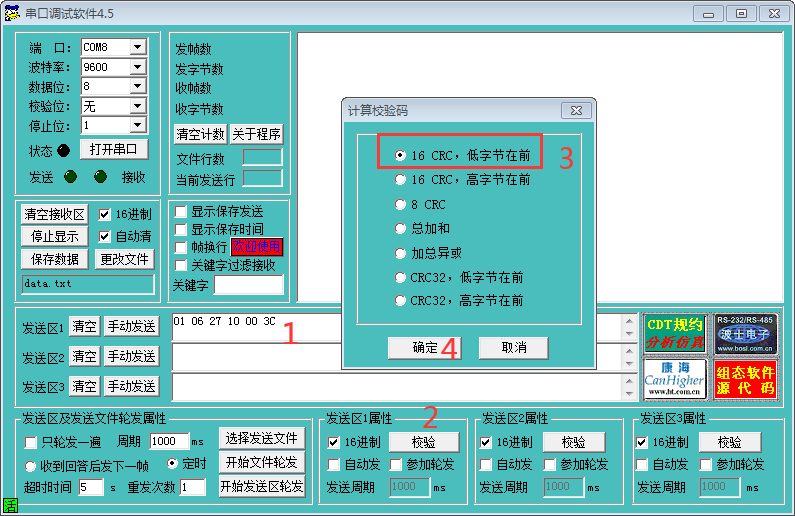
通过串口调试工具,将前面我们需要的地址粘贴在发送栏,按操作步骤1,2,3,4,会自动计算出校验高、底位:8D C6,并自动填入栏框。
- 开关量读入,【01功能码】
| 设备号 | 功能码 | 寄存器高位 | 寄存器底位 | 高位数值 | 底位数值 | 高位校验 | 底位校验 |
| 01 | 01 | 01 | 00 | 00 | 10 | 8D | C6 |
发送:01 01 01 00 00 10 3C 3A
返回:01 01 02 DB 00 E3 0C
解:发送读入状态,功能码为01,读取起启寄存器高位和底位地址0100(256),读入数量0010(16)路,加自动生成校验码8D,C6发送过去。返回01 01 02 DB 00 E3 0C,
返回值详解:
| 设备号 | 功能码 | 有效位 | 第一位 | 第二位 | 高位校验 | 底位校验 |
| 01 | 01 | 02 | DB | 00 | E3 | 0C |
设备号:与发送时,返回相同的设备号。
功能码:与发送时,返回相同的功能码。
有效位:表示后面紧跟着有多少个位数是有效的,02表示后面有2个位是有效的,DB、00一共有两位,是有效的,第一个位DB表示256起启地址中的共8路的开关量状态,DB转成二是11011011,表示第3和第6是关的,其它都为开。00表示从第9到第16路读入的开关状态,表示全关都为关闭状态。E3 0C表示返回时校验码。
注意:有效位有可能是04,06等,一般为16路开关的倍数。
- 【06功能码】,对时序控制的间隔时间调节。
| 设备号 | 功能码 | 寄存器高位 | 寄存器底位 | 高位数值 | 底位数值 | 高位校验 | 底位校验 |
| 01 | 06 | 27 | 10 | 00 | 01 | 43 | 7B |
于发送01 06 27 10 00 01 43 7B表示调节时序间隔时间为例进行详解:
设备号:表示当购买多台设备,在同一条RS485总线上进行手拉手连接时,每一台的设备必须是唯一的,产品发出时默认一般为01或02等,不固定,参考标签上显示,可后续修改。
功能码:功能码06表示模拟量单个写入,只对一个16位模拟量进行操作。
寄存器高位,寄存器底位:一般两个数组成一个值,27是高位,10是底位,2710是一个十六进制寄存器地址,可通过PC电脑计算器转换成十进制时是10000,正常与我们工程师沟通的时候会于(模拟量寄存器10000地址)的方式沟通,而操作员需要将此数值转化为十六进制为27 10,这个寄存器地址表示保存着延时的数值,修改这个数,就可以修改延时的间隔时间。
高位数值,底位数值:一般两个数组成一个值,这个数是修改时间, 0001表示1秒钟,输入0002表示2秒种,我们需要多少秒钟,如60秒,就将60秒转化为十六进制修改它就可以,【60】秒十进制相当于十进制的【3C】。
所以将延时修改成60秒就发送:01 06 27 10 00 3C 82 AA
高位校验,底位校验:我们对前面几项功能码的介绍全部输入正确的时候,需要将这些数据进行校验,在这里直接提供一个专用工具进行操作讲解。
通过串口调试工具,将前面我们需要的地址粘贴在发送栏,按操作步骤1,2,3,4,会自动计算出校验高、底位:82 AA,并自动填入栏框。
此时我们点击发送,可直接将时序的间隔时间修改成60秒。
下一篇: Modbus协议中浮点数的格式与换算方法
-
 Modbus协议中浮点数的格式与...
Modbus协议中浮点数的格式与...
Modbus协议中浮点数(单精度)使用的是IEEE754标准浮点数(32位)的表示方法: 从控...
-
 有关RS485总线通迅码,地址号...
有关RS485总线通迅码,地址号...
RS总线地址码,地址号的修改方法,当控制器有提供RS485接口,或有USB接口时,可以...
-
 中控主机,PLC、DCS应用的开...
中控主机,PLC、DCS应用的开...
本文介绍中控主机的上位机开发、和发送16进制,读写中控内部的开关量,读写中控内...
-
 以太网【SDK】【SOCKET】上位...
以太网【SDK】【SOCKET】上位...
开关控制SDK开发协议:获取和修改设备开关状态的指令 设备其它数据操作SDK开发协议...
-
【辅助位开关】网络开关控制...
本文介绍控制器的一些在线功能,在开发过程中,我们对控制器发送一些特定...
-
网络开关控制【时序全开】【...
本协议针对二次开发时,发送指令控制开关的一个小应用:当局域网中设备数量...